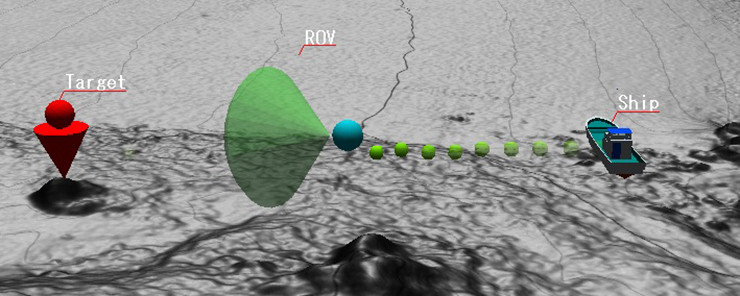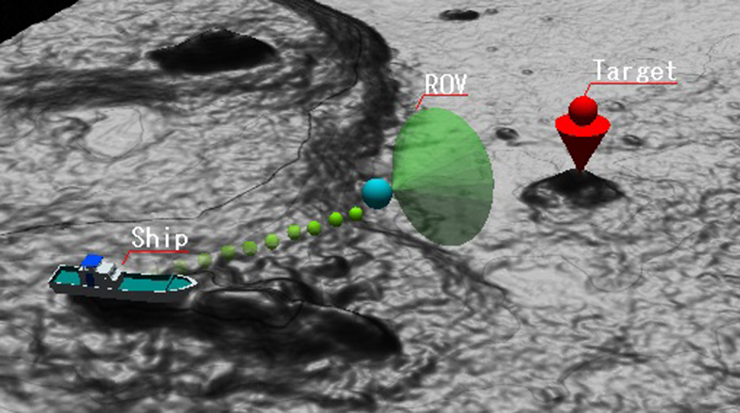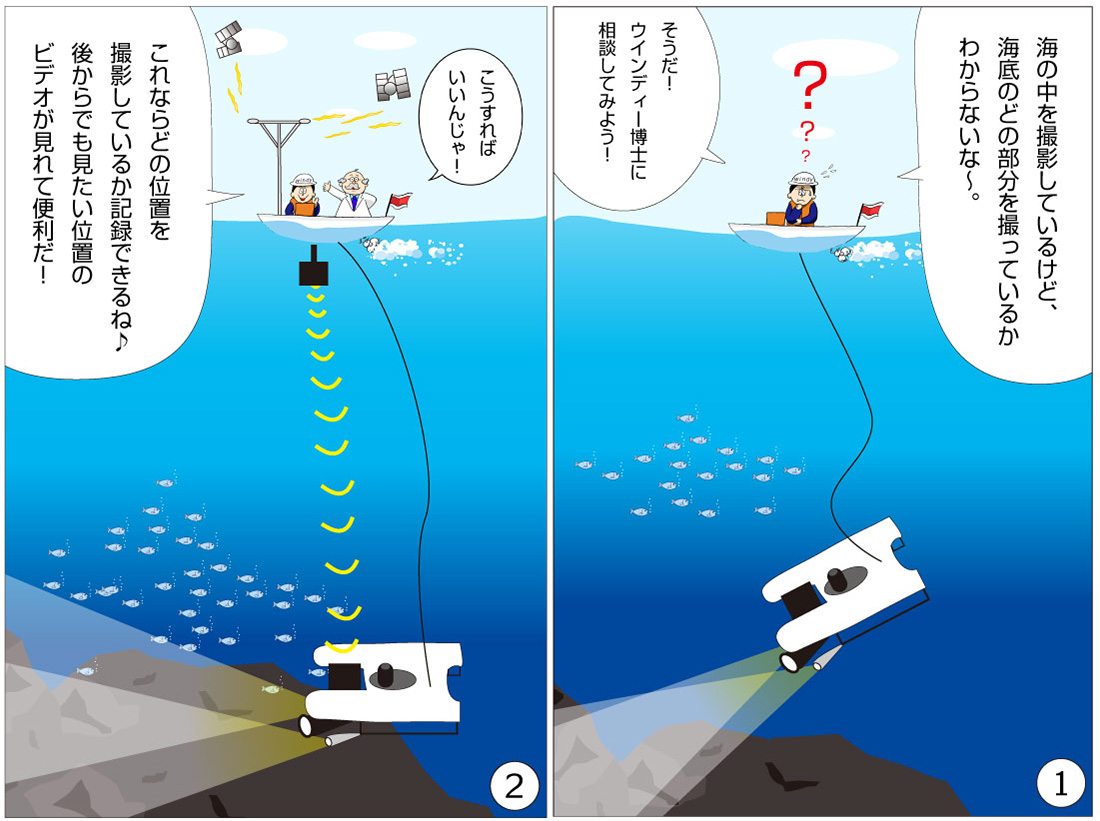
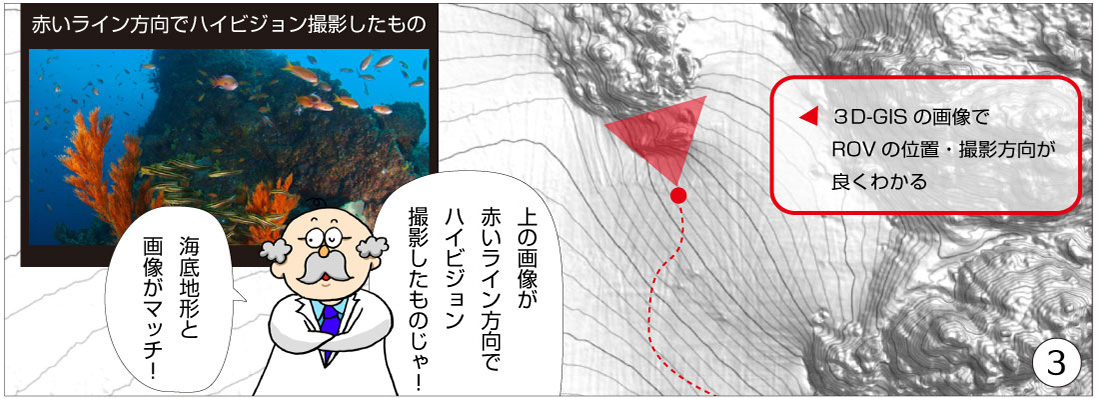
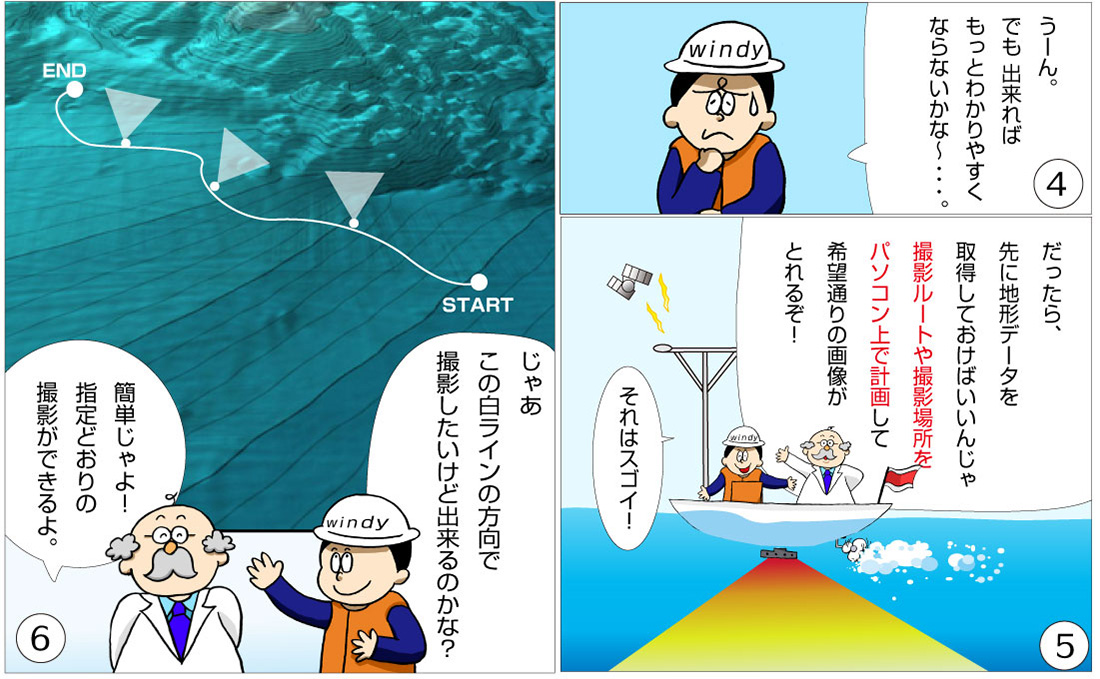
ROVによる水中撮影は海流や操作船の移動等により撮影場所を特定するのが困難でした。ウインディーネットワークは操作船の位置方向をPOS-MVを使用し精確に算出、操作船とROVの位置関係を音響位置計測システムにより算出し撮影位置及び方向をリアルタイムに記録できるPIAシステムを開発しました。あらかじめ海底地形を取得することにより3次元GIS上で撮影ルートを選定し計画通りの撮影ができます。
海底地形データをセットした海洋GIS(GeoLet)で操作船の位置及び方向をPOS-MVで算出し、水中音響測位装置によりROVの位置・水深・撮影方向を算出、GIS上にリアルタイムに表示します。